Ik ben promovendus aan de Universiteit Twente en werk aan realtime ruimtelijke perceptie en autonome kaartopbouw voor UAV’s. Mijn onderzoek combineert SLAM, visueel inertiële odometrie, 3D scene graph constructie, monoculaire diepteschatting, semantische segmentatie en learning based control.
Mijn focus ligt op het ontwikkelen van inzetbare robotsystemen waarmee UAV’s onbekende binnenomgevingen kunnen begrijpen, in kaart brengen en autonoom verkennen met lichte sensoren. Hiervoor ontwikkelde ik Mono Hydra++, een systeem dat semantisch rijke 3D representaties opbouwt uit monoculaire camera en IMU data, en deze gebruikt voor autonoom UAV gedrag getraind met reinforcement learning en imitation learning.
Mijn bredere doel is om visuele perceptie, geometrische mapping en robotbesluitvorming te verbinden in realtime systemen die op edge platforms kunnen draaien en betrouwbaar functioneren in complexe omgevingen.

Expertises
Computer Science
- Graph Construction
- 3d Scenes
- Robotics
- Robot
- Multitask Learning
- Range Finder
- Mobile Platform
Engineering
- Ultrasonic Sensor
Organisaties
Mijn onderzoek richt zich op realtime ruimtelijke perceptie en autonome UAV mapping in complexe binnenomgevingen. Ik werk aan systemen die fotogrammetrische computervisie, visueel inertiële odometrie, SLAM, deep learning, reinforcement learning, imitation learning en edge robotics combineren.
Een belangrijk onderdeel van mijn werk is het ontwikkelen van monoculaire mappingsystemen die camera en IMU input gebruiken om metrische en semantische 3D representaties van de omgeving op te bouwen. Dit omvat 3D scene graph constructie, diepteschatting, semantische segmentatie en sensorfusie voor UAV gebaseerde scene understanding.
Mijn doel is om geleerde perceptie, geometrische mapping en robotbesluitvorming met elkaar te verbinden. Daarmee wil ik autonome drones ontwikkelen die hun omgeving begrijpen, semantisch rijke kaarten opbouwen en deze representaties gebruiken voor betrouwbare navigatie en taakuitvoering op edge platforms.
Publicaties
2026
2025
2023
Onderzoeksprofielen
Promovendus in Robotica en Computervisie
Universiteit Twente, Nederland
2022 tot heden
Onderzoeksonderwerp: Autonome realtime UAV mapping met ruimtelijke perceptie in binnenomgevingen.
Masteropleiding Robotics Engineering
Middlesex University Dubai, Verenigde Arabische Emiraten
2019 tot 2021
Afgestudeerd met Distinction. Scriptie over heterogene zwermrobotsystemen met gedistribueerde edge verwerking voor collectief transport.
Bachelor Electrical and Electronics Engineering
University of Peradeniya, Sri Lanka
2014 tot 2017
Second Class Upper Division, GPA 3.55 van 4.00. Bekroond met de prijs voor Best Undergraduate Project door de Institution of Engineers Sri Lanka.
Verbonden aan opleidingen
Lopende projecten
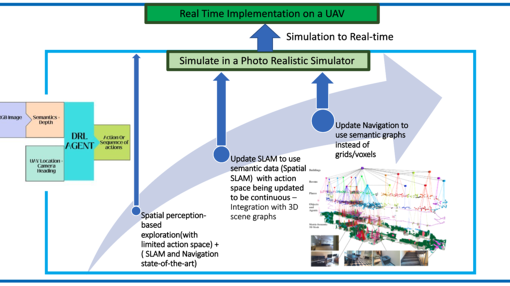
Op weg naar autonome en realtime UAV-mapping
Voltooide projecten
MONO-HYDRA: REAL-TIME 3D SCENE GRAPH CONSTRUCTION FROM MONOCULAR CAMERA INPUT WITH IMU

Vision-based mobile robot for reconnaissance
The objective was to create a 3D map of an unknown environment. It was tackled in 3 main fronts as a 3D- Vision system, an intelligent navigation system (INS) and holonomic robot platform with the localization algorithm. The vision system was developed at the basic level through fashioning two web cameras as a stereo camera pair. Laser ranging was used as the sensing method and a 2D map of the environment was obtained through the efficient guidance of the intelligent navigation system. A particle filter-based SLAM algorithm was implemented for the task localization a Kinect sensor was interfaced with the system for the task of extending the map to 3D.
Adres

Universiteit Twente
Langezijds (gebouwnr. 19), kamer 2305
Hallenweg 8
7522 NH Enschede
Universiteit Twente
Langezijds 2305
Postbus 217
7500 AE Enschede
 Scan de QR-code of
Scan de QR-code of